Information
FRC Java Programming Part 6: WPILIB PID
Basic shortcuts
| Ctrl + S | Save subtitles |
|---|---|
| Ctrl + click Double click | Edit highlighted caption |
| Tab | Edit next caption |
| Shift + Tab | Edit previous caption |
| Esc | Leave edit mode |
| Ctrl + Space | Play / pause video |
| Ctrl + Home | Play selected caption |
| Ctrl + Enter | Split caption at cursor position at current time |
Advanced shortcuts
| Ctrl + Insert | Add new caption |
|---|---|
| Ctrl + Delete | Delete selected caption |
| Ctrl + I | Edit currently played segment |
| Shift + Enter | New line when editing |
| Ctrl + Left | Play from -1s |
| Ctrl + Right | Play from +1s |
| Alt + Left | Shift caption start time -0.1s |
| Alt + Right | Shift caption start time +0.1s |
| Alt + Down | Shift caption end time -0.1s |
| Alt + Up | Shift caption end time +0.1s |
Annotation shortcuts
| Ctrl + 1 | Hesitation |
|---|---|
| Ctrl + 2 | Speaker noise |
| Ctrl + 3 | Background noise |
| Ctrl + 4 | Unknown word |
| Ctrl + 5 | Wrong segment |
| Ctrl + 6 | Crosstalk segment |
00:00.0
00:05.6
00:05.6
Uzun bir süreden sonra herkese tekrardan merhaba ve proglamlama serimize devam ediyoruz
00:05.7
00:16.0
00:16.0
Bu bölümde robotik için gerçekten önemli olan ve özellikle daha gelişmiş projelerde işinize yarayacak PID'den bahsedeceğiz.
00:30.8
00:46.5
00:46.5
PID belirli bir sensör değerini kolay bir şekilde belirli bir yerde sabit tutmanızı kolaylaştırır.
02:23.0
02:27.8
02:27.8
Motorlar hatayı düzeltmek adına güç uygulayacaktır ve hata payına orantısal bir şekilde
02:32.8
02:37.6
02:37.6
Eğer fazla güç uygulanırsa ise hata payı negatif olacağı için ters yönde güç uygulanacaktır.
02:42.6
02:47.4
02:47.4
Buna orantısal kontrol diyoruz ve yeteri kadar iyi bir yöntem değil çünkü hedefe ulaşmamız zor.
03:10.1
03:23.0
03:23.0
Burada bizim değişme miktarını türevle hesaplayıp performansı iyileştirmemizi sağlayacaktır.
03:23.1
03:32.5
03:32.5
Eğer türevinizi biliyorsanız değiştirme hatasına göre bir güç uygulayarak hatanızı düzeltebilirsiniz.
03:32.6
03:46.8
03:46.8
Yaptığınız hatayı hesaplayıp hataya göre hareket etmek orantısal kontrole göre size daha yardımcı olacaktır.
03:46.9
03:54.2
03:54.2
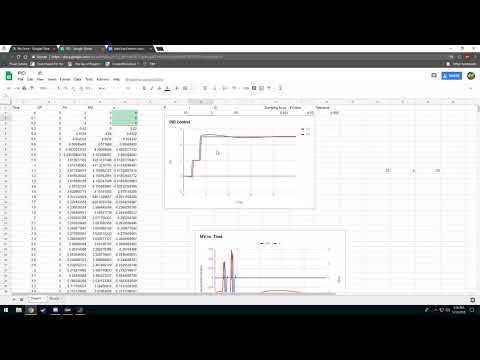
Eğer buradaki dampening force değişkenini değiştirirsek karşımıza çıkan grafik de değişecektir.
03:54.3
04:03.3
04:03.3
Üstteki grafikte gördüğünüz gibi her ne kadar mükemmel olmasa da hedefe daha çok yaklaştık.
04:23.7
04:28.5
04:28.5
Doğru katsayıyı bulmak için farklı metodlar vardır ancak deneme yanılma yapmak da gerekir.
04:28.6
04:33.4
04:33.4
Farklı metodlardan birisi ise ilk P sonra D sonra ise I katsayılarını ayarlamaktır bu sayede en doğru değere ulaşabilirsiniz.
05:09.8
05:14.6
05:14.6
Örneğin hedefinize yaklaştıkça daha küçük ayarlamalar yapmanız gerektiği için sürtünmenin etkisi artabilir.
05:31.6
05:34.2
05:34.2
Örneğin burada P 10 D 20 olmasına rağmen I yı 2 verdik ve karşımıza gayet güzel bir grafik çıktı
05:34.3
05:39.1
05:39.1
kırmızı ve mavi çizgiler neredeyse aynı hizada bu da hedefimize ne kadar iyi ulaşabileceğimizi gösteriyor.
05:39.2
05:46.7
05:46.7
PID sistemlerinde katsayıları doğru ayarlamak en çok zaman harcanan kısımdır ancak doğru yaparsanız çok iyi bir sonuç alırsınız.
05:46.8
06:04.9
06:04.9
PID aynı zamanda dönmek için de kullanılabilir. Yani robotunuzun tam olarak 90 derece olmasını istiyorsanız bu konuda PID işinize yarar.
06:12.7
06:23.4
06:23.4
Kodumuzda en son TalonSRX tanımlarını ve kurulumunu yapmıştık şimdi ise PID kurulumuna geçebiliriz.
06:28.4
06:35.4
06:35.4
Bu kodu ister Spark kullanarak ister TalonSRX kullanarak yapabiliriz sonuçta tüm metodları WPILibden kullancağız.
06:35.5
06:43.1
06:43.1
Ve bu sayede işimiz büyük ölçüde kolaylaşacak ancak yine de yapamamız gereken çok şey var.
07:14.9
07:19.7
07:19.7
Hesaplamaların mantığını anlamak istiyorsanız Wikipedia'da detaylı anlatımlar mevcut ancak şu an sadece PIDController'ı bilmemiz yeterli.
07:50.9
08:00.1
08:00.1
ve bunun için drivebase'imizi kontrol etmemiz gerekiyor bu da bizim PID outputumuz oluyor.
08:00.2
08:10.2
08:10.2
Ancak dönmek için birdan fazla motoru kullandığımız için tek bir motor yerine bir fonksiyon ile bu işlemi yapacağız.
08:10.3
08:28.4
08:28.4
Eğer java'ya hakimseniz, interfaceleri bilirsiniz. Ana sınıfımıza implements PID output ekliyoruz.
08:33.4
08:47.4
08:47.4
Sensörden okunan değer sonucunda uygulanması gereken işlemleri bu fonksiyonda belirleyeceğiz ve bu sayede istediğimizi yapacağız.
08:47.5
09:19.4
09:19.4
Şimdi ise yapmamız gereken motorların neye göre çalışacağını ve ne yapmalarını istediğimizi bu fonksiyona yazmak.
09:34.5
09:47.5
09:47.5
Bunun için ise bir sensör tanımlayabiliriz ve bu sayede PID Input kaynağı sağlamış oluruz.
09:54.9
09:59.7
09:59.7
Bu sensörü kullanmak için de farklı kütüphanelere ihtiyacımız var siz de bu kütüphaneleri kullancaksanız sizin de ihtiyacınız olacak.
10:04.7
10:25.8
10:25.8
Basit olarak şimdi yaptığımız tanım yani navX bizim PID Inputumuz olacak ve robotumuzun pozisyonunu bize bildirecek.
10:35.7
10:59.2
10:59.2
navX'in takılı olduğu port genellikle Roboriodaki MXP portu oluyor. Ve yazdığım portu yazarak AHRS tanımlamasını bitiriyoruz
11:24.2
11:29.0
11:29.0
Buradaki argümanları sonradan da değiştirebileceğiniz için farklı değişkenler yaratırsanız işiniz kolaylaşacaktır.
11:29.1
11:45.6
11:45.6
Şimdi deneme amaçlı olduğu için bu katsayıları şimdilik 0 yapacağım sonradan değiştirebiliriz.
12:05.2
12:20.4
12:20.4
Source olarak doğrudan navX'in adını yazarsak input değişkenini de tanımlamış olacağız.
12:20.5
12:25.3
12:25.3
Output olarak ise yazmamız gereken şey ise drivebase metodunda olduğumuz için this yazmanız yeterli.
12:32.3
12:55.1
12:55.1
Controller input ve output tanımladık ancak şimdi yapmamız gereken girdi değerinin aralığını belirtmek.
12:55.2
13:05.9
13:05.9
Burada yazdığımı yazarak ve bir minimum bir de maksimum değer belirleyerek girdilerinize aralık belirleyebilirsiniz.
13:06.0
13:10.8
13:10.8
Bizim ise burada belirleyeceğimiz aralık -180 derece ile 180 derece arasında olacağı için bu değerleri yazıyorum.
13:20.1
13:29.8
13:29.8
Yapacağımız hareket dönme hareketi olduğu için yeterli bir miktar güç olan %45 in ters ve düz yönde olacak şekilde belirliyoruz
13:29.9
13:55.4
13:55.4
Şimdi ise ayarlamamız gereken absoultetolerance değeri var. Bu değer için 2 derece yeterli olacaktır.
14:13.2
14:23.1
14:23.1
-180 derece ile 180 derece arasındaki fark 360 derece yerine 1 derece olduğu için bu değeri ayarlamamız gerekiyor
14:23.2
14:28.0
14:28.0
setContinious satırını ekleyerek PID kontrolörümüzü dönmeye göre ayarlamamıza yardımcı olacağız.
14:28.1
14:44.1
14:44.1
Ve tüm bu değerler sayesinde çalışacak bir PID controller elde ettik şimdi ise yapmamız gereken ise
14:44.2
14:56.3
14:56.3
bu kontrolörün çalışmasını tetikleyecek bir komut oluşturmak ve ne zaman çalışacağını belirlemek.
15:12.1
15:33.0
15:33.0
Normalde dönmek için 2 yol vardır ya tek bir yönde sabit bir değere ulaşmak adına dönersiniz ya da değişken bir değere göre dönersiniz.
15:33.1
15:44.7
15:44.7
Bu fonksiyonda yapmamız gereken ise sensörümüzün değerini sıfırlamak ve oryantasyonunu güncel konumuna göre ayarlamak.
16:42.5
16:54.5
16:54.5
Gerekli zamanlarda çalışması için bir komut atayabiliriz örneğin otonom ya da bir düğmeye basıldığında çalışması için.
16:54.6
17:10.0
17:10.0
Başlı başına öğrenmek adına bunu da yapmamız öğrenme açısından işimize yarayacaktır ve yardımcı olacaktır
17:10.1
17:14.9
17:14.9
O yüzden komutlar paketinde yeni bir class oluşturalım ve buraya PID için çalışacak komutumuzu hazırlayalım
17:37.1
17:50.2
17:50.2
Sınıfı temizledikten sonra kullanacağımız bir fonksiyon açıp komutumuz için gerekli olan değerleri girmemiz gerekiyor.
17:50.3
18:06.4
18:06.4
PID kontrolörünün ne zaman işlemi bitirdiğini öğrenmek için bir boolean oluşturabliriz.
18:23.2
18:41.1
18:41.1
Şimdi ise normal bir komut yaparken yapmamız gereken basit şeyleri yapmamız gerekiyor.
19:01.8
19:10.7
19:10.7
İnit kısmında ise, PID kontrolörünü çağırmamız gerekiyor basitçe PID kontrolörü kendi döngüsünde dönüyor ve
19:10.8
19:22.2
19:22.2
bu nedenle execute kısmında bahsetmemize gerek yok init kısmında bahsetmemiz çalışması için yeterli olacaktır.
19:22.3
19:35.1
19:35.1
İnit kısmında bu komut sayesinde çalışması gerektiğini ve neye göre çalışması gerektiğini kontrolöre söylüyoruz ve buna göre çalışıyor.
19:35.2
19:51.3
19:51.3
Ancak kontrolörün belli bir süreden sonra durması gerekmekte bunu ise ben PID deki hata payına göre yapmayı tercih ediyorum.
19:51.4
20:12.5
20:12.5
Bunu da burada yazdığım satırla tanımlayabiliyoruz ve bu tanım sayesinde uzaklığa göre ne zaman durması gerektiğini ayarlayabileceğiz.
20:12.6
20:23.5
20:23.5
Ve durmamız için bir uygun aralık belirlersek istediğimiz hedefe ulaştığımızda robotun dönmeyi durmasını sağlayabiliriz.
20:23.6
20:45.8
20:45.8
Normalde PID controller hedefine ulaştığında duracaktır ancak robotun durmasını sağlamak için bu aralığa ihtiyacımız var.
20:45.9
20:50.7
20:50.7
Bunun için ise bir farklı boolean oluşturarak ve boolean true olduğunda robotun durmasını sağlayacağız.
20:50.8
21:15.3
21:15.3
Hata payının mutlak değer 2'den küçükse boolean değerimiz true hale gelecek ve bu sayede robotun dönemsini durdurabileceğiz.
21:15.4
22:06.3
22:06.3
Ayrıca yeni bir if döngüsü oluşturup robotun dönüşünü kesinleştirmek adına bir de count adında yeni bir değişken oluşturup
22:06.4
22:40.6
22:40.6
Dönüşün ne zaman kesin olarak tamamlandığını öğrenip ona göre durdurmak adına eğer istediğimiz değere 5 kere ulaşıldıysa kontrolörü ve robotu durduruyoruz.
23:03.6
23:13.3
23:13.3
Eğer hedefe ulaşılmadıysa ise yani değer 5 in altında kaldıysa sıfırlıyoruz ve olana kadar devam etmesini sağlıyoruz.
23:13.4
23:32.4
23:32.4
Ve eğer tüm bu aşamalar başarılı bir şekilde geçildiyse isfinished değişkenimiz de true hale gelecek ve işlem ve komut sonlanacak.
23:32.5
24:00.7
24:00.7
Bitirmeden önce dikkat etmemiz gereken son noktalardan birisi ise eğer bu işlemlerden herhangi birisi bölünürse veya durdurulursa kontrolörün de durmasını sağlamalıyız.
24:00.8
24:12.7
24:12.7
Bunun için ise en son bir end metodu oluşturarak bu metoda komut ve işlem tamamlandığında yapılması gerekenleri yazmamız gerekiyor.
24:17.7
24:34.1
24:34.1
Şu ana kadar yaptıklarımızdan yola çıkarak umarım PID'yi daha iyi bir şekilde anlamışsınızdır ve kullanabilirsiniz.